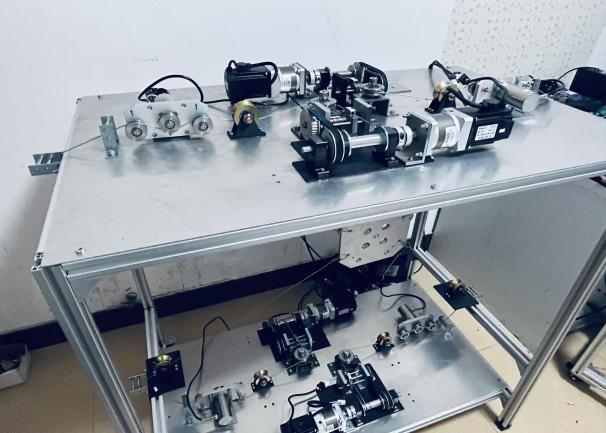
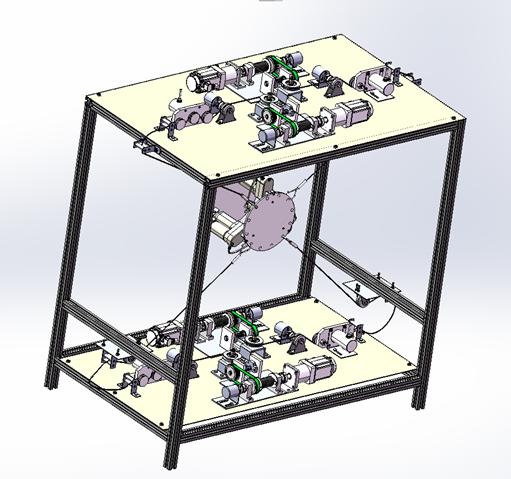
绳驱动并联机器人:
绳驱动并联机器人采用柔性绳索替代传统刚性连杆,通过多电机协同控制绳索长度,实现末端装置在三维空间内的精准运动。其核心特点与优势如下:
1.显著技术优势
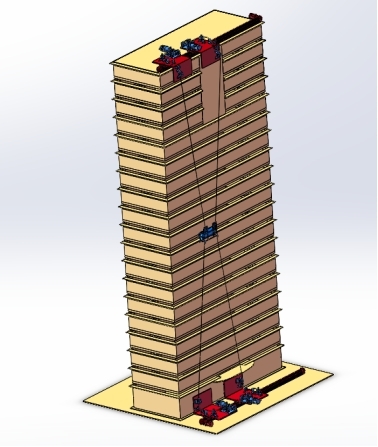
超大工作空间:绳索柔性特性使其可达数十米级运动范围,适用于大型场景(如风洞实验、航天器对接仿真)。
高动态响应:轻量化设计结合低惯性驱动,加速度可达10 m/s²以上,适合高速拾放、轨迹跟踪等任务。
负载自适应:通过张力优化算法,可动态调整绳索拉力,兼容从克级到百公斤级的负载需求。
2.关键性能参数
精度:重复定位精度±0.1 mm(局部工作空间),绝对精度通过视觉/激光辅助可达±1 mm。
自由度:支持3-6自由度运动,典型配置为6自由度(3平移+3旋转)。
扩展性:模块化设计支持多机协同,适用于复杂任务(如大型曲面加工)。
3.应用场景
涵盖工业分拣、航空模拟、医疗康复及特种作业等领域,尤其适合大尺度、高灵活性的操作需求。可以通过创新控制算法(如抗干扰鲁棒控制、智能优化)持续提升系统性能,助力先进装备研发。